 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoving On, Even When You're Broken: Fail-Active Trajectory Generation via Diffusion Policies Conditioned on Embodiment and Task
Feb 02, 2026Robot failure is detrimental and disruptive, often requiring human intervention to recover. Maintaining safe operation under impairment to achieve task completion, i.e. fail-active operation, is our target. Focusing on actuation failures, we introduce DEFT, a diffusion-based trajectory generator conditioned on the robot's current embodiment and task constraints. DEFT generalizes across failure types, supports constrained and unconstrained motions, and enables task completion under arbitrary failure. We evaluated DEFT in both simulation and real-world scenarios using a 7-DoF robotic arm. In simulation over thousands of joint-failure cases across multiple tasks, DEFT outperformed the baseline by up to 2 times. On failures unseen during training, it continued to outperform the baseline, indicating robust generalization in simulation. Further, we performed real-world evaluations on two multi-step tasks, drawer manipulation and whiteboard erasing. These experiments demonstrated DEFT succeeding on tasks where classical methods failed. Our results show that DEFT achieves fail-active manipulation across arbitrary failure configurations and real-world deployments.
Compliant Explicit Reference Governor for Contact Friendly Robotic Manipulators
Apr 12, 2025



This paper introduces the Compliant Explicit Reference Governor (C-ERG), an extension of the Explicit Reference Governor that allows the robot to operate safely while in contact with the environment. The C-ERG is an intermediate layer that can be placed between a high-level planner and a low-level controller: its role is to enforce operational constraints and to enable the smooth transition between free-motion and contact operations. The C-ERG ensures safety by limiting the total energy available to the robotic arm at the time of contact. In the absence of contact, however, the C-ERG does not penalize the system performance. Numerical examples showcase the behavior of the C-ERG for increasingly complex systems.
Distributed Reinforcement Learning for Cooperative Multi-Robot Object Manipulation
Mar 21, 2020
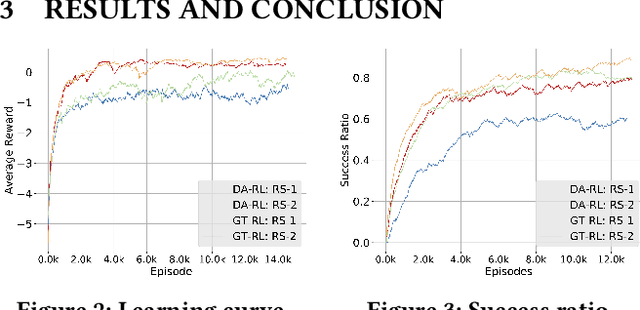
We consider solving a cooperative multi-robot object manipulation task using reinforcement learning (RL). We propose two distributed multi-agent RL approaches: distributed approximate RL (DA-RL), where each agent applies Q-learning with individual reward functions; and game-theoretic RL (GT-RL), where the agents update their Q-values based on the Nash equilibrium of a bimatrix Q-value game. We validate the proposed approaches in the setting of cooperative object manipulation with two simulated robot arms. Although we focus on a small system of two agents in this paper, both DA-RL and GT-RL apply to general multi-agent systems, and are expected to scale well to large systems.
* 3 pages, 3 figures